Architecture and Directory Structure
This section describes only the directory structure and module relationships of the released version, and does not involve the internal implementation in
/src.
Top-level Directory Structure (Summary)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | |
Key directory descriptions:
-
include/: Header files (public headers and model-specific headers)include/zsl-1/highlevel.h,include/zsl-1/lowlevel.hinclude/zsl-1w/highlevel.h
-
lib/: Compiled runtime libraries (separated by model and architecture)lib/<model>/<arch>/libmc_sdk_<model>_<arch>.solib/<model>/<arch>/mc_sdk_<model>_py.*.so(Python extension)
-
demo/: Sample programs (C++ / Python)demo/zsl-1/cpp,demo/zsl-1/python/examplesdemo/zsl-1w/cpp,demo/zsl-1w/python/examples
- Other:
CMakeLists.txt,build.sh,README.md, etc.
ZsiBot System Architecture
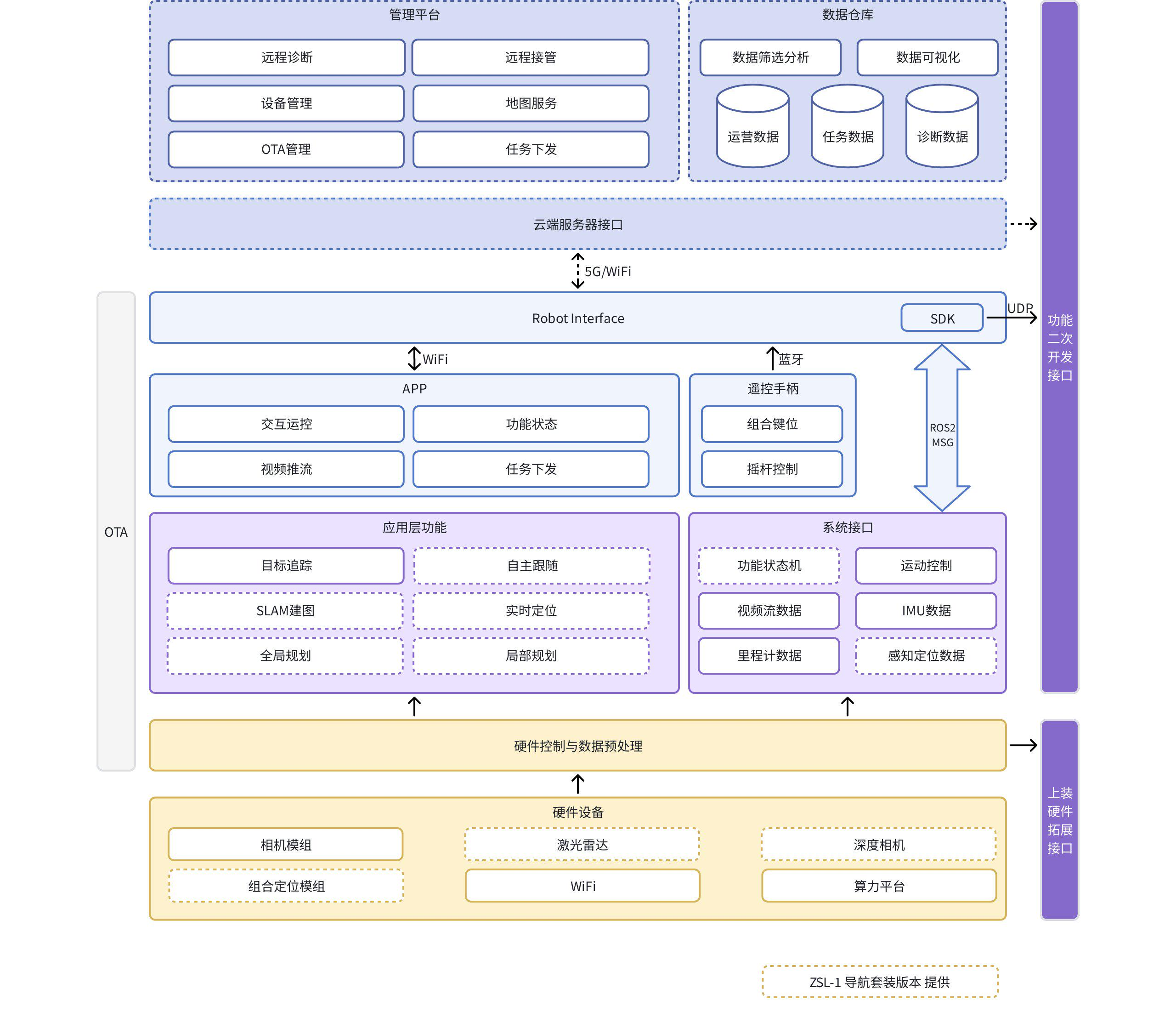
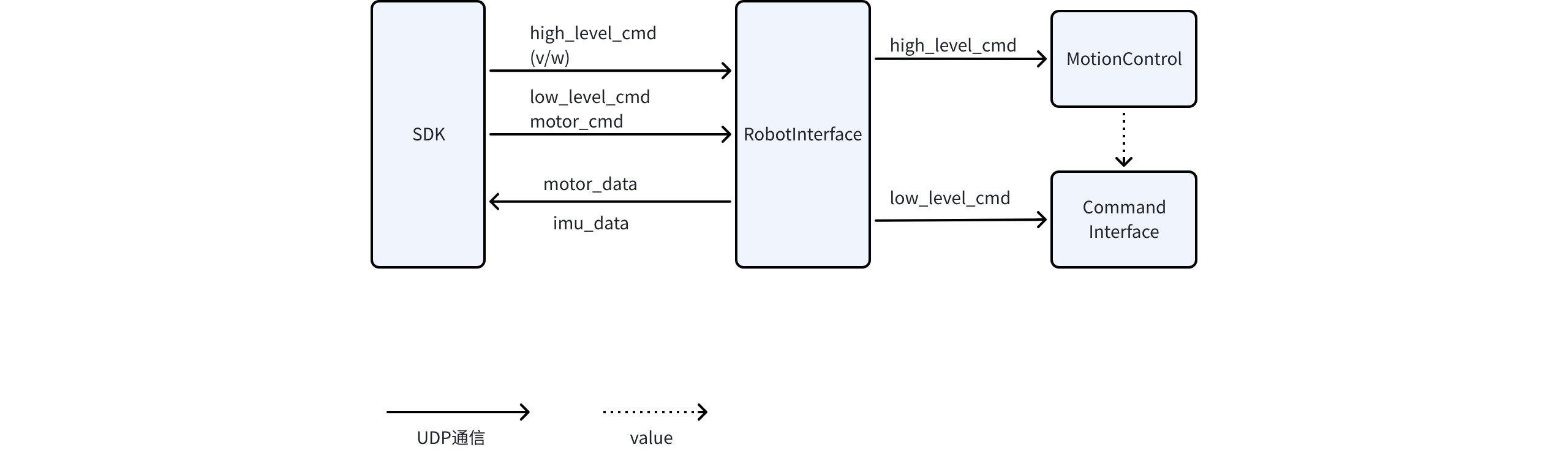
SDK Software Block Diagram
Currently, motion control-related SDK interfaces are open, including high-level motion control interfaces, low-level motor control interfaces, IMU inertial data interfaces, and motor status data interfaces
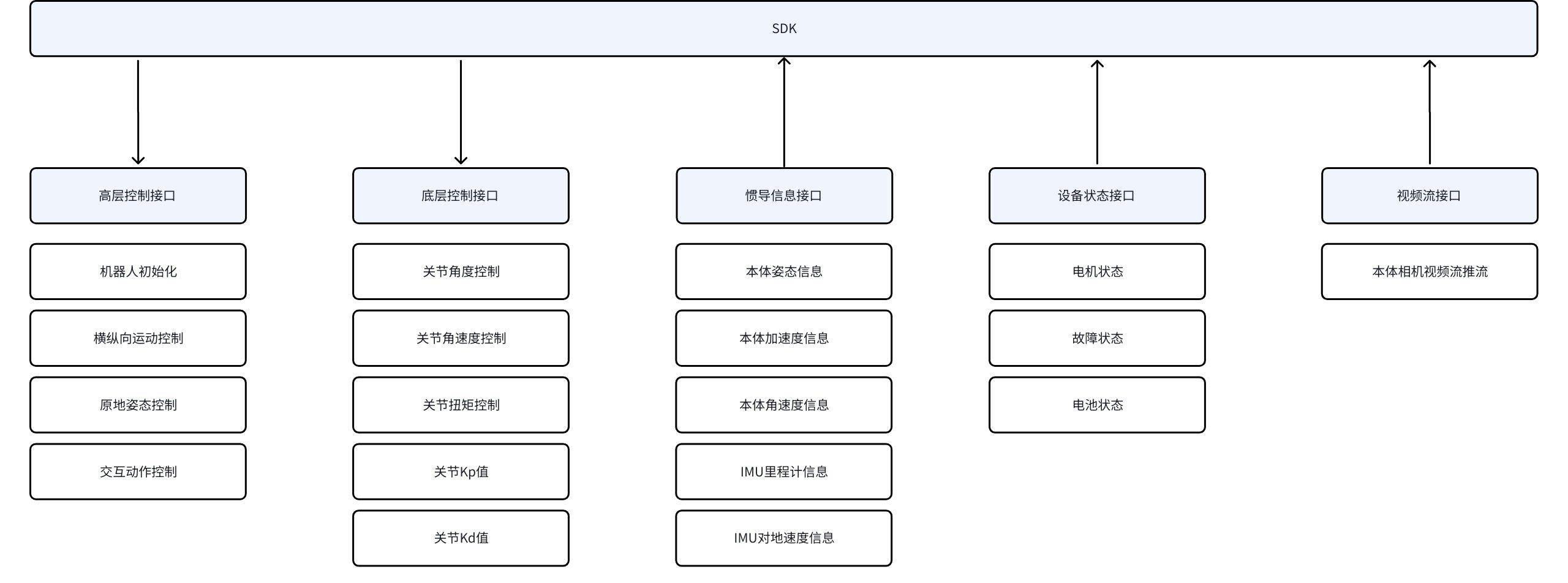
SDK Software Interfaces
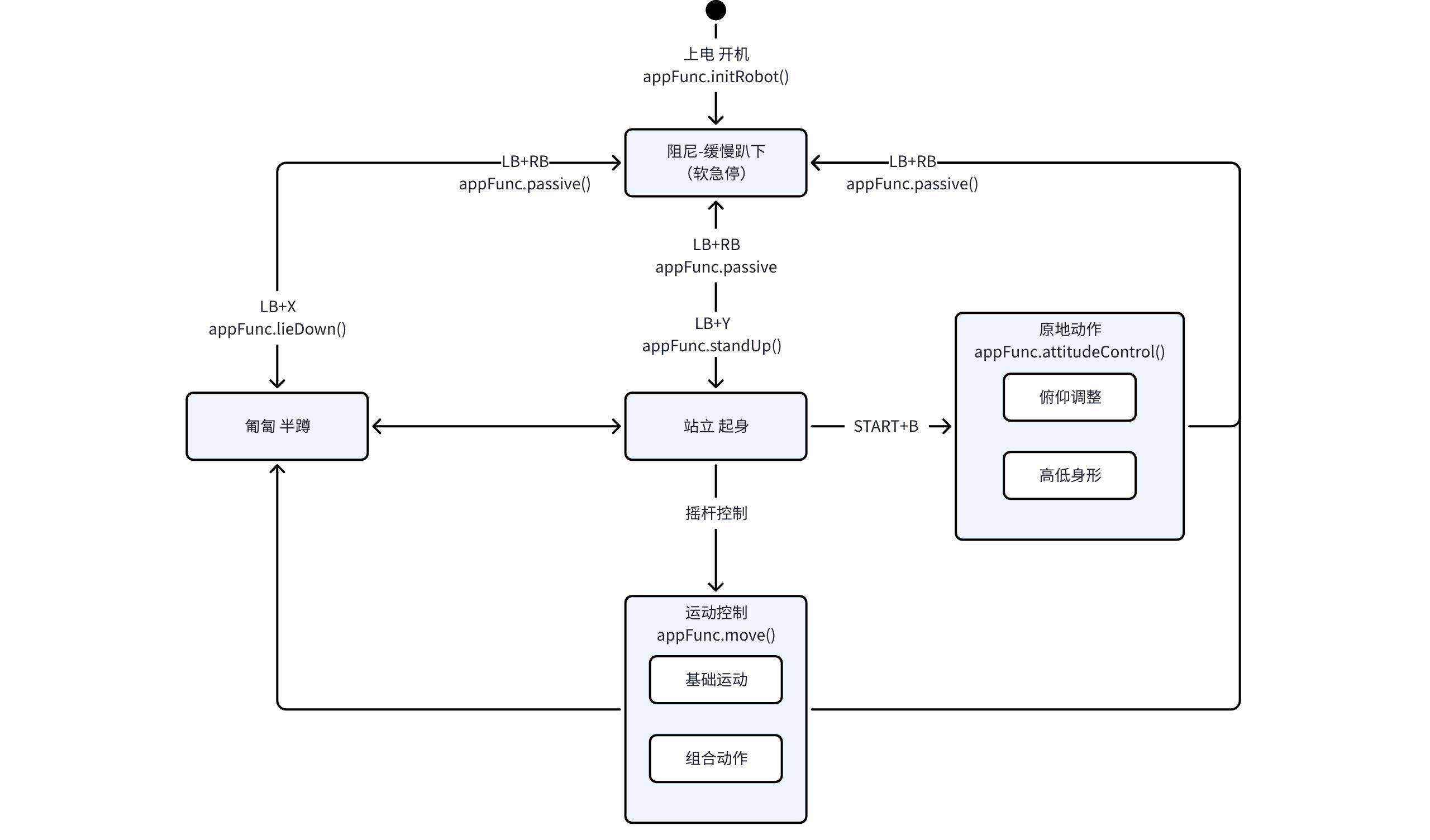
Motion Control State Machine
Instructions need to be issued according to the following state transition logic, otherwise the machine may fall, malfunction, or not respond
Joint Control Command Description
📌 Command Order
- FR (right front)
- FL (left front)
- RR (right rear)
- RL (left rear)
🔄 Joint Direction Definition
- A, H, K Joint Coordinate System: Forward as X-axis, Left as Y-axis, Up as Z-axis
- Leg Order: Front-Right, Front-Left, Rear-Right, Rear-Left
- Rotational Coordinate System: Right-Hand Rule
- Forward Direction: Positive X-axis; Left Direction: Positive Y-axis; Up Direction: Positive Z-axis
🔧 Control Parameters
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | |